


在上一个章节中,我们简要介绍了协作机械臂硬件设计的相关知识,在本章节中将会言简意赅地(流程性地)给大家介绍协作机械臂的运动控制,即拥有了一台协作机械臂后该如何控制其运动,具体相关运动控制的细节内容实际上是一门复杂的独立学科,有兴趣的同学可以去翻阅The Hand Book of Robotics。
(1)基本框架
下图7是一个控制(协作)机械臂最基本的逻辑流程图。
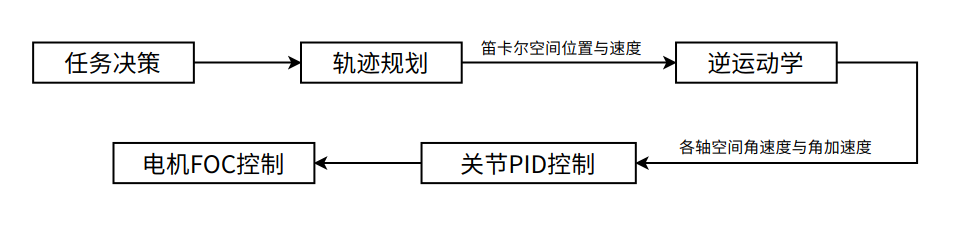
首先是需要高层的任务决策,这个决策以当前的技术水平,主要是人工即使用者下发的,这边需要注意的是一般这类任务决策都是相对具体的指令,比如说可以下发“机械臂需要从A点把某个物体移动到B点”,但不适合下发“机械臂帮我把这个房间打扫干净”的指令——后者涉及到人工智能层面的多维认知与任务分解,技术难度已经远超于机器臂层面的运动控制。
接着在具体的任务决策指令下,需要通过具体的轨迹规划算法去生成机械臂末端(即笛卡尔空间)的运动轨迹。简单来说,机械臂末端的运动轨迹需要离散成空间内的若干点,每个点都映射相应的位置信息和机械臂到达该点的速度信息,同时还涉及到各个点之间的插值问题。轨迹规划好坏的衡量指标为机械臂运行是否光滑与平顺,一般需消除极端位置与高速度点的出现,从而避免机械臂产生高速与抖动等不正常危险运动。






