
工业机器人制造商
助力中小制造企业智能生产
全国咨询热线:
222-2222
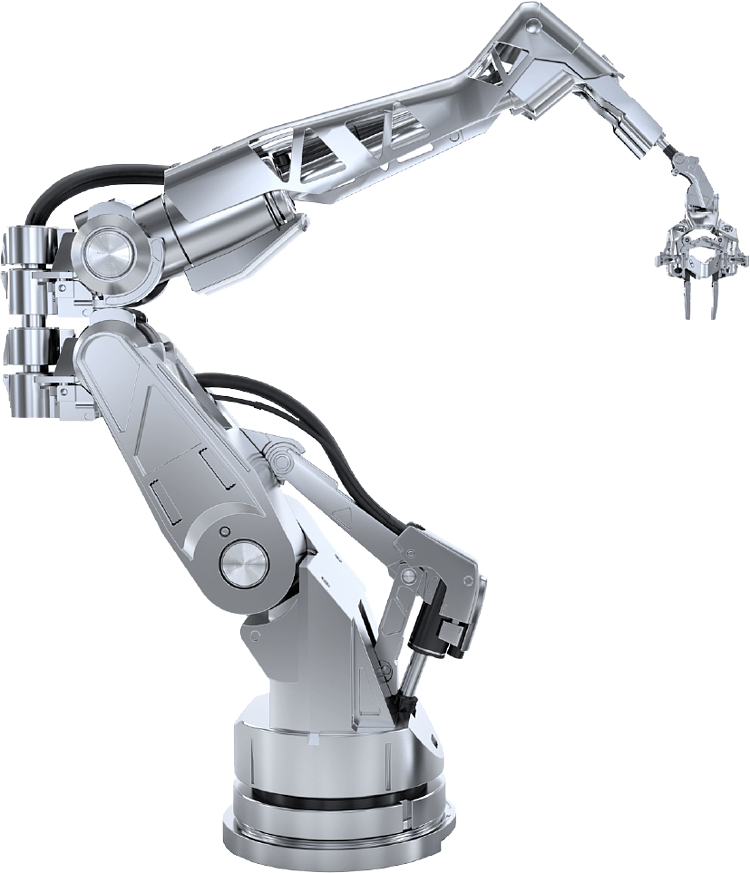


在上一个章节中,我们简要介绍了协作机械臂硬件设计的相关知识,在本章节中将会言简意赅地(流程性地)给大家介绍协作机械臂的运动控制,即拥有了一台协作机械臂后该如何控制其运动,具体相关运动控制的细节内容实际

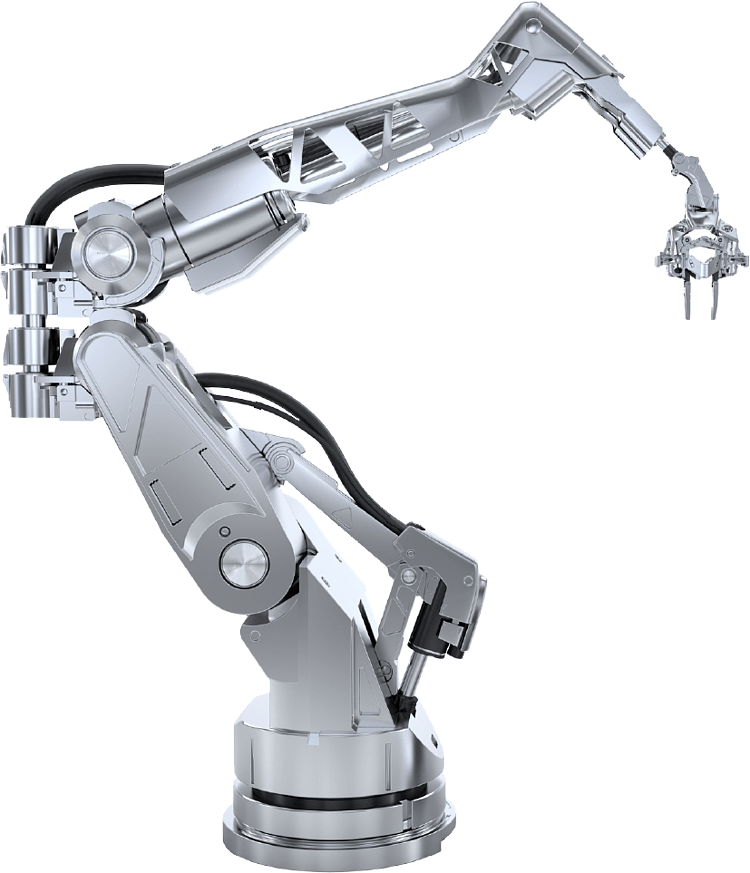
在实际使用过程中,我们会在机械臂的末端集成相应的末端执行器,以提升机械臂的实际操作与抓取能力,一般末端执行器会通过如下三种形式出现:气动吸盘、夹爪与灵巧手,如下图6所示。图6. 协作机械臂与各类末端执

协作机械臂除机身本体外,一般在实际使用过程中我们还要搭配控制柜与示教器来进行操作使用,具体如下图5所示。图5. 协作机械臂(UR 5e) 与其控制柜和示教器(图片来源:Universal-Robot)

力矩电机是通过FOC矢量控制来输出所需求的转速和扭矩,再通过谐波减速器进行转速和扭矩关系的调制,一般在协作机器人中,是经谐波减速器把电机的高转速+低扭矩工况转化为实际使用需要的低转速+大扭矩的工况;F

长按屏幕识别二维码
打开手机扫描二维码






